Voir la traduction automatique
Ceci est une traduction automatique. Pour voir le texte original en anglais cliquez ici
#Robotique et automatisation
{{{sourceTextContent.title}}}
Le projet de télescope de trente mètres est calé, mais le robot requis pour l'établir est prêt
{{{sourceTextContent.subTitle}}}
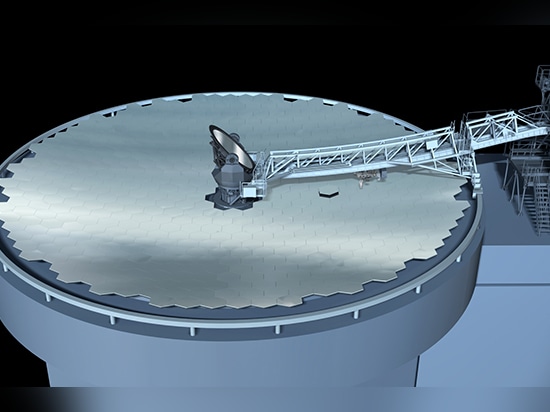
Le projet d'une manière prosaïque appelé du télescope de trente mètres (TMT), un observatoire prévu à construire sur Mauna Kea, la grande île, en Hawaï, est énorme de chaque manière : les USA rapportés budget du dollar $1.4 milliards, un miroir géant composé de 492 plus petits segments de miroir, et un but d'étudier pas simplement les étoiles de notre manière laiteuse mais de galaxies formant au bord même de l'univers observable.
{{{sourceTextContent.description}}}
Bien que ce projet soit soutenu par les gouvernements de la Chine, du Japon, du Canada, et de l'Inde, comme les Etats-Unis, il ne peut être jamais établi. Pour son endroit est considéré sacré par quelques Hawaïens, dont les protestations ont été entendues tout le chemin vers la Cour Suprême d'État d'Hawaï, qui a en décembre 2015 infirmé TMT ? s a précédemment accordé le permis de construire.
Le projet étant suspendu pendant plus d'une année, le scientifique et les entreprises de construction impliqués peuvent seulement maintenir leurs doigts croisés que le cas contesté ira leur manière. En attendant, Mitsubishi Electric, qui a développé la structure principale de TMT, annoncée cette semaine l'accomplissement d'un robot de prototype pour un système de segmenter-manipulation (SHS) pour installer et remplacer les segments de miroir. Aucune tâche facile, donnée chaque segment hexagonal ne pèse environ 250 kilogrammes et mesures 1.44 mètre à travers des coins.
? Notre conception et utilisation originales d'un algorithme de force-commande aide à réduire le temps nécessaire pour remplacer les miroirs de segment par 60 pour cent comparés aux conceptions conventionnelles ?
? Tomonori Sato, Mitsubish électrique
Les miroirs en verre sont enduits de l'aluminium pour la rendre r3fléchissante. Mais l'aluminium dégrade avec le temps et le réenduisage est exigé rudement tous les deux ans. Pour rechercher un miroir particulier pour l'entretien et le remplacer par un miroir de réservation exige le levage lourd ? quoiqu'avec un contact doux, pour pour ne pas endommager le verre relativement fragile. Et c'est où le système de robot de SHS hérite le jeu.
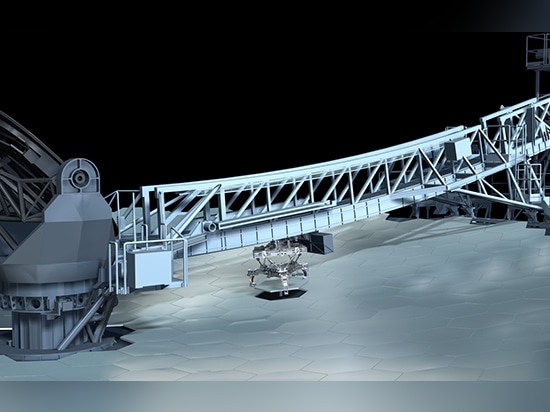
Le robot se déplace expédie et vers l'arrière le long d'un pont de 15 mètres. Le pont peut tourner autour de la circonférence du miroir, et ceci permet au robot de SHS d'être placé au-dessus des 492 segments l'uns des.
Clefs d'un opérateur humain dans un segment particulier ? l'endroit de s pour le robot et soulève alors le segment à l'aide d'un axe entraîné par un moteur électrique d'installation. De ce point dessus, le reste de l'opération est entièrement automatisé.
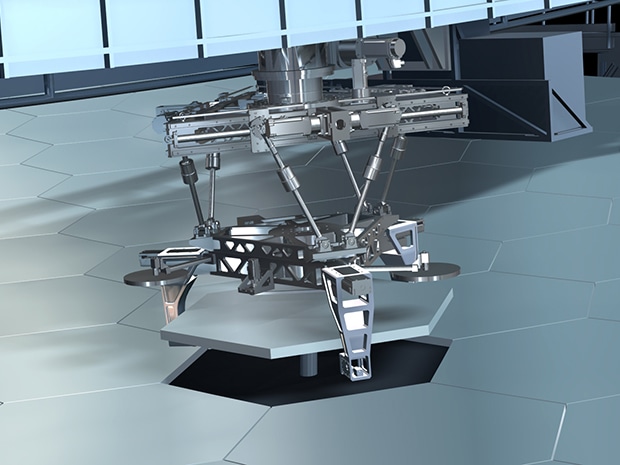
Le robot de SHS a 6 degrés de libre circulation. Pour assurer la charge sur le segment est également équilibré, le robot est équipé de trois bras indépendants avec des poignées utilisées aux prises le miroir visé, et préparation de lui pour le transport.
IMG
Illustration : Mitsubishi Electric
La surface du miroir est fortement r3fléchissante, qui le rend difficile pour que le robot juge avec précision la distance et l'angle du segment de cible. Ainsi Mitsubishi a conçu un système de vision ce des projets trois modèles de checkered-drapeau sur le segment. Les sondes de vision vérifient les modèles reflétés, et le robot ajuste sa taille et l'angle de la rotation jusqu'à ce que les modèles assortissent un modèle prédéterminé, indiquant le robot est correctement placé pour s'emparer du segment.
Une sonde de force, qui détecte la charge appliquée sur le miroir à à moins de 1 kilogramme d'exactitude, est utilisée pour empêcher des erreurs dans saisir du segment, parce que le déséquilibre de charge peut tordre le verre. Des données de sonde sont employées pour commander le robot de SHS et pour maintenir même une charge sur les bras.
IMG
Illustration : Mitsubishi Electric
Le segment est alors transporté sous le pont de nouveau à un centre d'entretien pour le nettoyage ou le réenduisage. Un miroir de rechange est chargé à la main et le robot revient à son endroit précédent et établit le segment.
? Notre conception et utilisation originales d'un algorithme de force-commande aide à réduire le temps nécessaire pour remplacer les miroirs de segment par 60 pour cent comparés aux conceptions conventionnelles ? Tomonori Sato, le cadre supérieur de Mitsubishi Electric ? groupe de projet autonome de développement de systèmes de contrôle de s, dit le spectre d'IEEE. ? Nous avons quatre brevets en instance pour la technologie. Un pour le mécanisme du robot de SHS, deux pour la technologie de force-commande, et un pour la vision sentant. ?
Il a ajouté que même dans le pire scénario de TMT obtenant décommandé ? l'astronomie doit continuer à avancer. En outre, ce n'est pas le seul projet à grande échelle de télescope étant construit. Ainsi nous croyons que SHS aura beaucoup à contribuer à d'autres projets semblables. ?